Voxelizing the dataset
For voxelizing the dataset, we first need to load the dataset in its raw PyVista format:
from cooldata.pyvista_flow_field_dataset import PyvistaFlowFieldDataset
ds_pv = PyvistaFlowFieldDataset.load_from_huggingface(
num_samples=12, data_dir="datasets/pyvista"
)
Loaded 12 samples from '/Users/ole/Documents/software/flow_field_dataset/docs/usage/datasets/pyvista'.
Loaded 12 samples from 'datasets/pyvista'.
Next, we define a voxelization resolution, and create a voxelized dataset. The bounds are automatically determined as the minimum and maximum coordinates over the whole dataset.
from cooldata.voxel_flow_field_dataset import VoxelFlowFieldDataset, VoxelFlowFieldDatasetConfig
ds_voxel = VoxelFlowFieldDataset(
cache_dir="datasets/voxels",
config=VoxelFlowFieldDatasetConfig(
pyvista_dataset=ds_pv, resolution=(32, 16, 16)
),
)
Voxelizing samples: 100%|██████████| 12/12 [00:04<00:00, 2.75it/s]
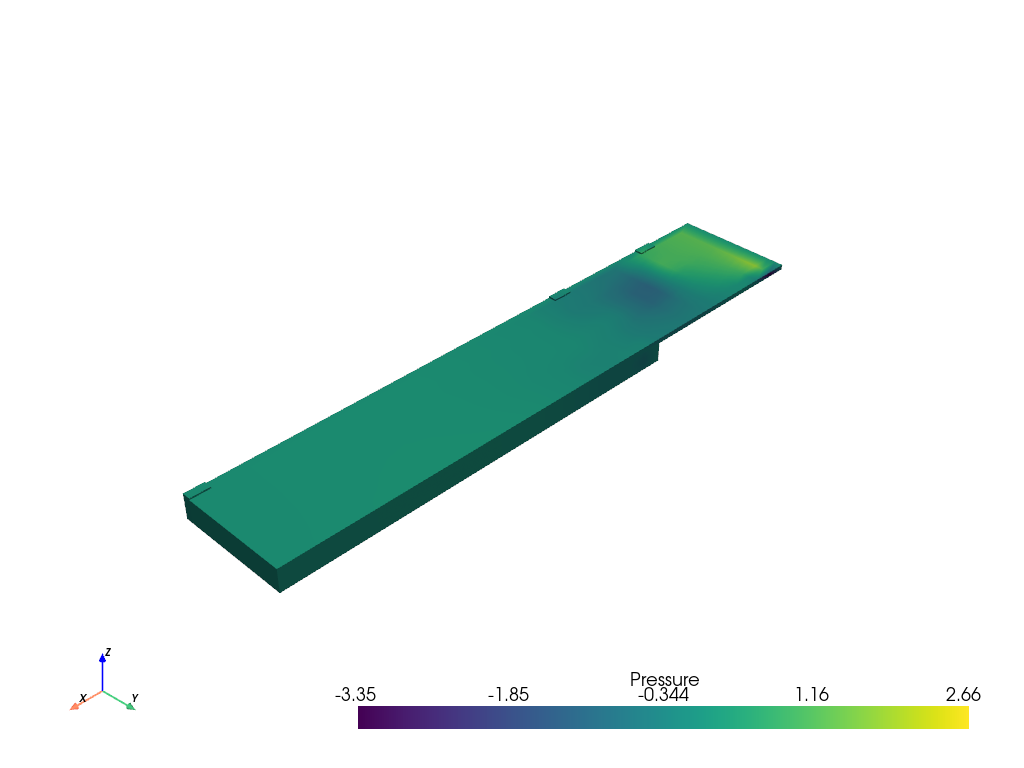
Again, we can visualize the samples in 3d:
ds_voxel[0].plot("Pressure")
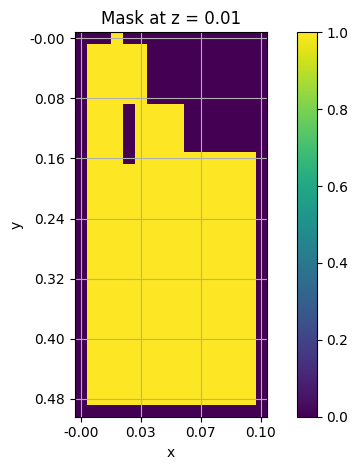
Next, we can plot a slice through the sample:
ds_voxel[0].plot_slice("Mask", slice_idx=9,axis="z")
Now, in order to train a model, we can convert this to a torch dataset. The samples from this dataset are tuples of the form (mask, y), where mask is a 3d tensor of shape (n_x, n_y, n_z) that is True for all voxels that are occupied with fluid, and y is a tensor of shape (n_x, n_y, n_z, 5) that contains the flow properties at each voxel.
ds_torch=ds_voxel.get_default_loadable_dataset()
mask, y =ds_torch[0]
print(mask.shape, y.shape)
torch.Size([32, 16, 16]) torch.Size([32, 16, 16, 5])
However, it is often required to normalize the flow properties to have zero mean and unit variance:
y.mean()
tensor(37.3221)
The dataset library implements this:
ds_voxel.normalize()
ds_torch=ds_voxel.get_default_loadable_dataset()
mask, y = ds_torch[0]
y.mean()
tensor(-0.1331)
Now, nothing stops us from training a model on this dataset:
from torch.utils.data import DataLoader
dataloader = DataLoader(ds_torch, batch_size=4, shuffle=True)
for batch in dataloader:
mask, y = batch
print(mask.shape, y.shape)
print(y.mean())
# let your own model predict y from the mask
break
torch.Size([4, 32, 16, 16]) torch.Size([4, 32, 16, 16, 5])
tensor(0.0058)
We implemented a simple 3d U-Net here